Appearance
上传数据集
图片, 点云基础 与 点云融合 数据集的格式要求:
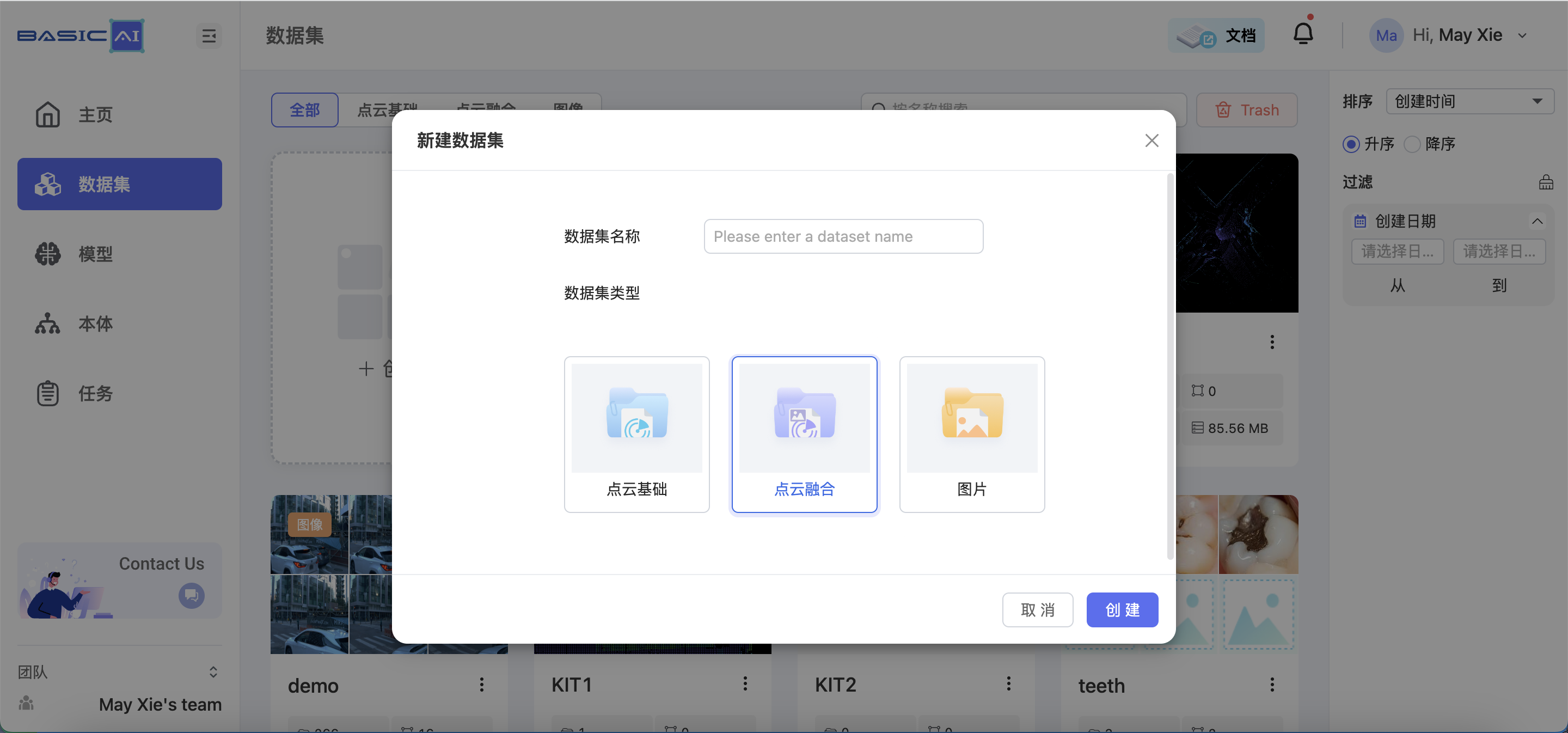
点云基础: 适用于需要在连续帧中处理点云数据的任务。根据您创建的本体,检测和分类每个点云对象,然后在连续帧中跟踪这些对象。 主要标注工具为3D边界框、3D多边形。
点云融合: 适用于需要在连续帧中处理融合了图片和点云数据的2D、3D融合任务。根据您创建的本体,检测和分类LiDAR和图像的每个物体,然后在连续帧中跟踪这些对象。 主要工具包括2D边界框、3D边界框、2D多边形,和3D多边形。
图片: 使用边界框、多边形和折线等工具,根据您创建的本体,检测和分类图片里的每个物体。它可以用于目标检测、车道检测等。
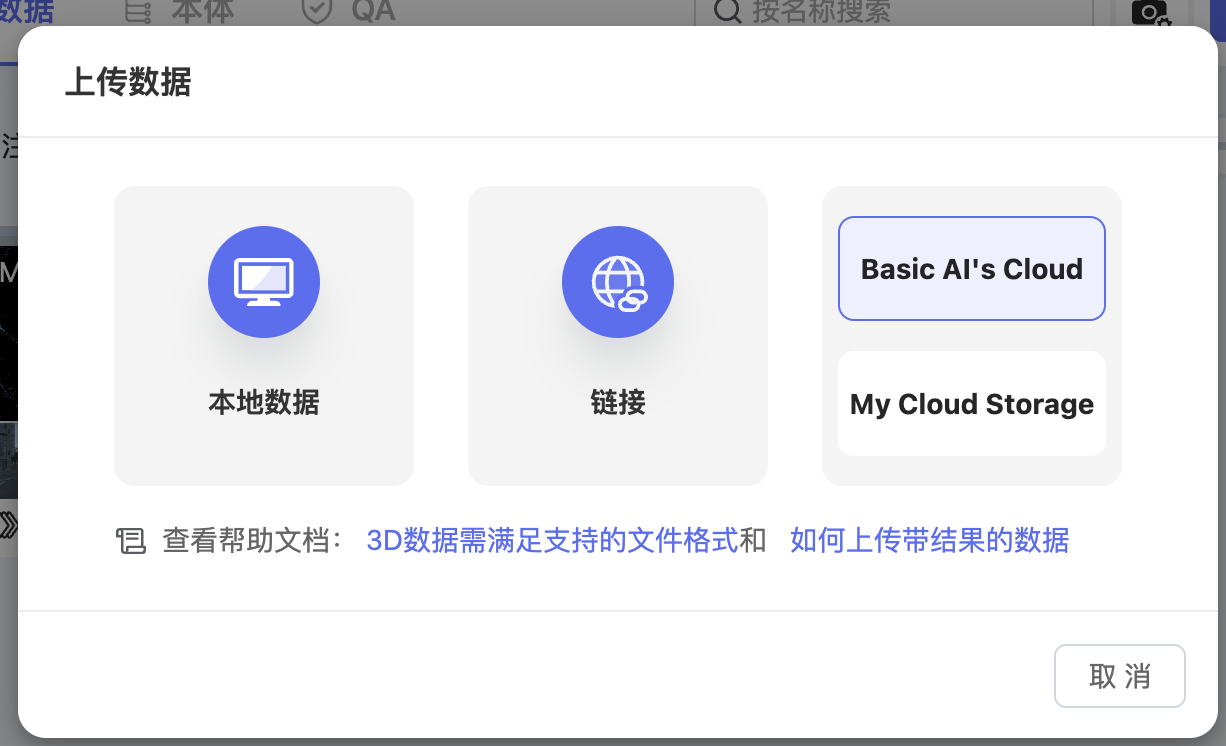
上传选项
数据集可以通过 本地数据,链接 和 云存储(包含了BasicAI云和我的云存储) 三种方式上传
通过本地数据的方式上传
在电脑的本地磁盘中选择您要上传的文件
通过链接的方式上传
可以在通过Bucket列表页面和对象详情页面轻松获取不同公共云存储服务的文件URL访问方式,GCP和Azure的操作也类似。
通过 云存储(BasicAI云) 的方式上传
请参考MinIO使用教程页面。通过云存储(我的云存储) 的方式上传
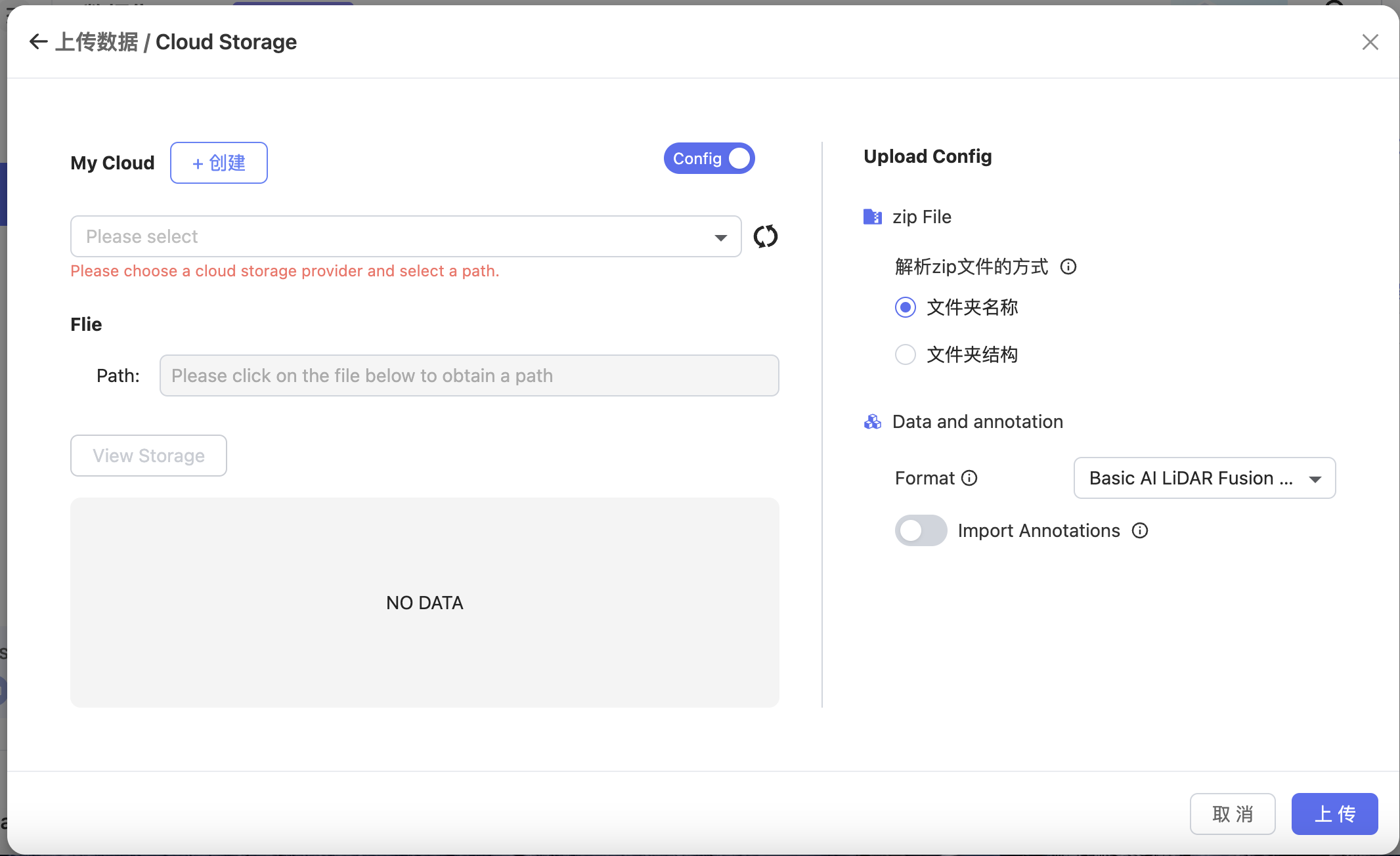
需要在团队-云存储页面中连接自己的云存储进行数据的访问和上传。
以下以百度网盘为试例:
图片数据集
图片数据可以直接上传,也可以根据需求按照规定的命名形式上传,不管是按照文件夹名称上传还是按照文件夹结构上传,图片只能放在命名为image_0的文件夹中。
| 数据类型 | 支持的格式 |
|---|---|
| 图片数据 | .jpg, .png, .jpeg, .bmp, .tiff, .webp(可直接上传) |
| 上传文件 | 压缩包文件(.zip, .gzip, .tar, .rar格式) |
视频数据(图片连续帧,目标追踪项目)
平台支持将视频数据进行抽帧进行连续帧的图片标注,可以在上传数据时自定义抽帧的方式。
| 数据类型 | 支持的格式 |
|---|---|
| 视频数据 | .mp4, .mov, .wmv |
| 上传文件 | 压缩包文件(.zip, .gzip, .tar, .rar格式) |
上传视频时数据集类型依旧选择图片,在上传了对应的视频数据后可以在配置中设置抽帧的规则。

- 抽帧仅支持单个连续帧最高1000帧,超过1000帧会拆分成新的连续帧;
- 拆分的连续帧名称为视频名称,如拆分为多个,后续追加数字。
音视频数据
此类数据适用于音/视频的分割和语音转录等项目。 支持视频文件(mp4、mkv、mov) 、音频文件(mp3、wav、m4a) 或包含有效图像型的压缩文件(zip/.gzip/.tar/.rar)。
| 数据类型 | 支持的格式 |
|---|---|
| 视频数据 | 视频文件(.mp4、.mkv、.mov) 、音频文件(.mp3、.wav、.m4a) |
| 上传文件 | 压缩文件(zip/.gzip/.tar/.rar) |
点云数据
点云数据集文件夹必须被压缩并放置在命名为lidar_point_cloud_0的文件夹下,并且必须是 .pcd格式。
| 点云数据 | 规则 |
|---|---|
| 文档命名 | lidar_point_cloud_0 |
| 文件格式 | .pcd 格式 |
| 上传文件 | 压缩包文件 (.zip, .gzip, .tar, .rar格式) |
2D & 3D 点云融合
2D & 3D 点云融合数据要求:
| 文档命名 | 规则 |
|---|---|
| lidar_point_cloud_0 | .pcd格式文件 |
| camera_config | 相机参数文件 |
| camera_image_0 | 第一组图片数据 |
| camera_image_1 | 第二组图片数据 |
| camera_image_2 | 第三组图片数据 |
| ... | ... |
| camera_image_N | 第N组图片数据 |
同组数据必须命名一致,分别放置在不同的文件夹中。例如001.pcd和001.png.
.
├── camera_config // 相机参数,具体格式参考“点云相机参数格式”
│ ├── data1.json
│ └── data2.json
├── camera_image_0 // 相机0图片
│ ├── data1.jpg
│ └── data2.jpg
├── camera_image_1 // 相机1图片
│ ├── data1.jpg
│ └── data2.jpg
├── camera_image_2 // 相机2图片
│ ├── data1.jpg
│ └── data2.jpg
├── lidar_point_cloud_0 // Lidar 点云0
│ ├── data1.pcd
│ └── data2.pcd
├── result // 标注和分割结果,具体结构参考 Data 标注结果格式和
├── scene_1 // 连续帧,其下结构类似于根目录
│ ├── camera_config
│ ├── ...
│ └── result
└── batch1 // 批,其下结构类似于根目录
├── camera_config
├── ...
├── result
└── scene_1