Appearance
上传图片数据
| 数据类型 | 支持的格式 |
|---|---|
| 图片数据 | .jpg and .png; 文档(.zip, .gzip, .tar, .rar格式) |
上传单张图片
bash
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
.
.
.
上传连续图片
bash
├──scene_00001
├── image_0
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
├──scene_00002
├── image_0
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
├──scene_00003
├── image_0
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
.
.
.
上传单张与连续混合图片
bash
├──scene_0001
├── image_0
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
├──image_0
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
上传带结果的图片(单张与连续混合)
bash
├──scene_0001
├── image_0
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
├── result
├──image_0
│ ├── 00.jpg
│ ├── 01.jpg
│ ├── 02.jpg
├──result
上传点云基础数据
点云数据集文件夹必须被压缩并放置在命名为lidar_point_cloud_0的文件夹下,并且必须是 .pcd格式。
| 点云数据 | 规则 |
|---|---|
| 文档命名 | lidar_point_cloud_0 |
| 文件格式 | .pcd 格式 |
| 上传文件 | 文档 (.zip, .gzip, .tar, .rar格式) |
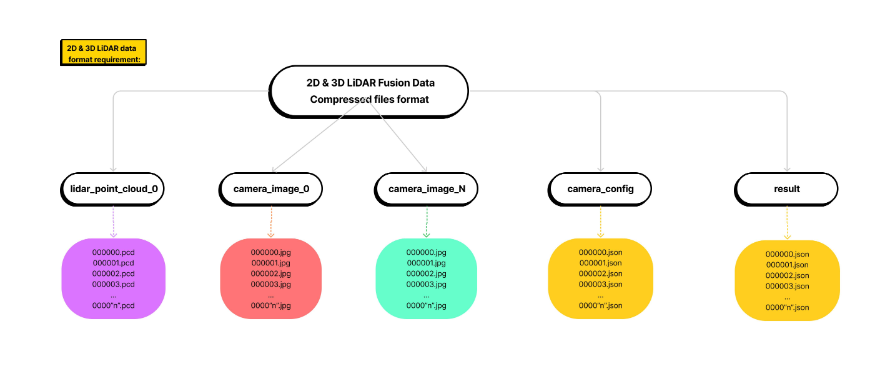
上传2D & 3D 点云融合数据
2D & 3D 点云融合数据要求:
| 文档命名 | 规则 |
|---|---|
| lidar_point_cloud_0 | .pcd格式文件 |
| camera_config | 相机参数文件 |
| camera_image_0 | 第一组图片数据 |
| camera_image_1 | 第二组图片数据 |
| camera_image_2 | 第三组图片数据 |
| ... | ... |
| camera_image_N | 第N组图片数据 |
| result | 结果数据(如果有的话) |
所有数据必须对应好各自的文件名,放置在不同的文件夹中。
结构
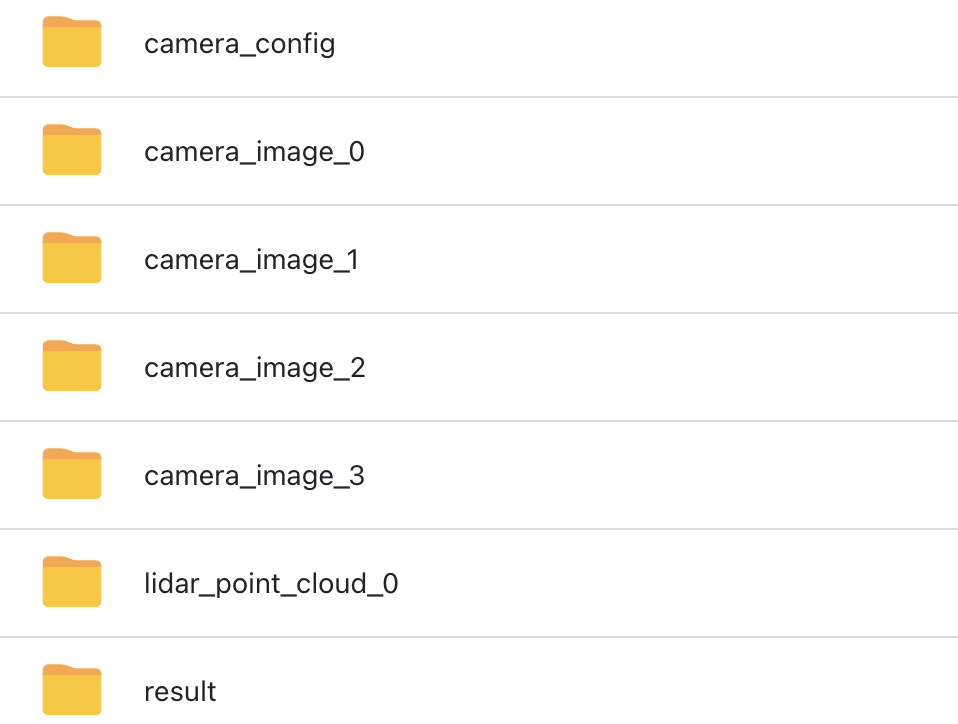
2D & 3D 点云融合数据集的结构组成(文档命名不可修改):
bash
├── lidar_point_cloud_0
│ ├── 00.pcd
│ ├── 01.pcd
│ ├── 02.pcd
├── camera_image_0
│ ├── 00.png
│ ├── 01.png
│ ├── 02.png
├── camera_image_1
│ ├── 00.png
│ ├── 01.png
│ ├── 02.png
├── camera_image_2
│ ├── 00.png
│ ├── 01.png
│ ├── 02.png
├── camera_config
│ ├── 00.json
│ ├── 01.json
│ ├── 02.json
├── result
│ ├── 00.json
│ ├── 01.json
│ ├── 02.json
如果您的数据集不受支持或在导入数据集方面遇到任何问题,请及时联系我们。